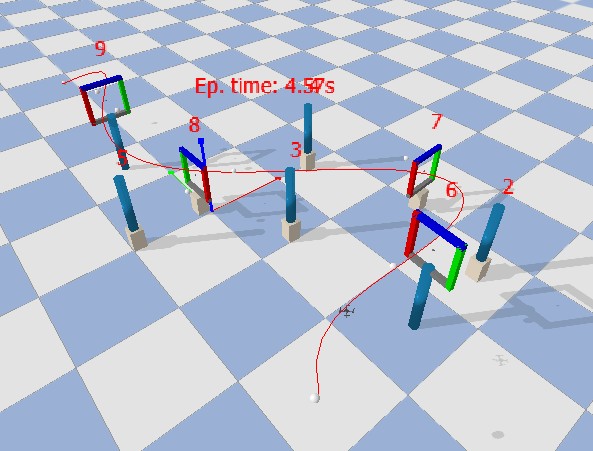
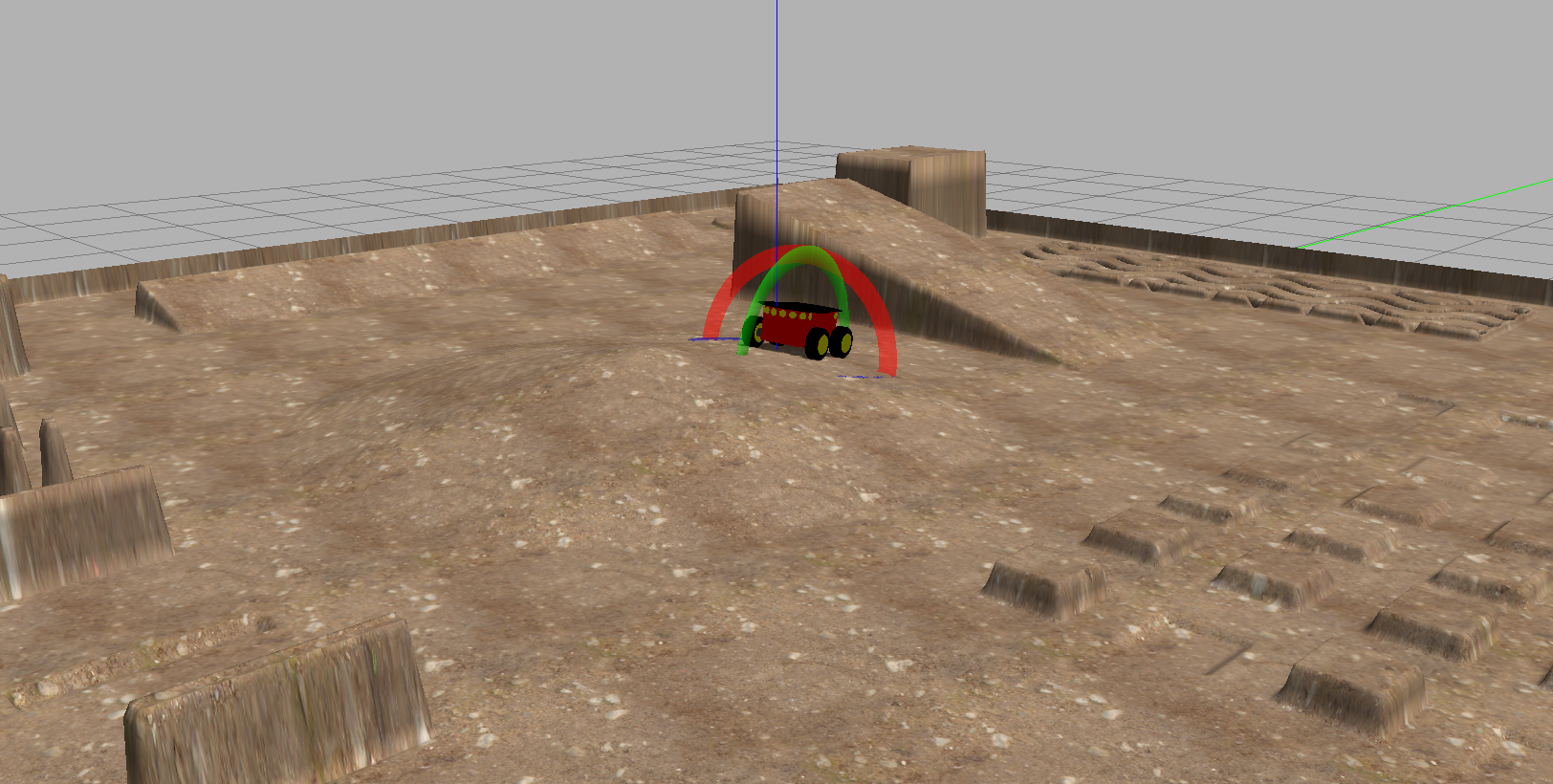
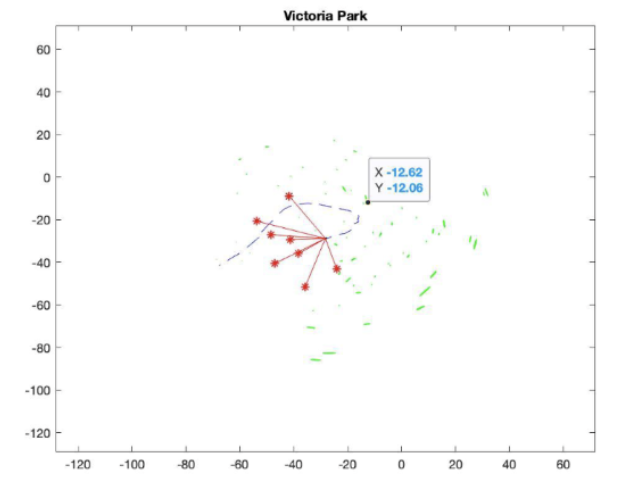
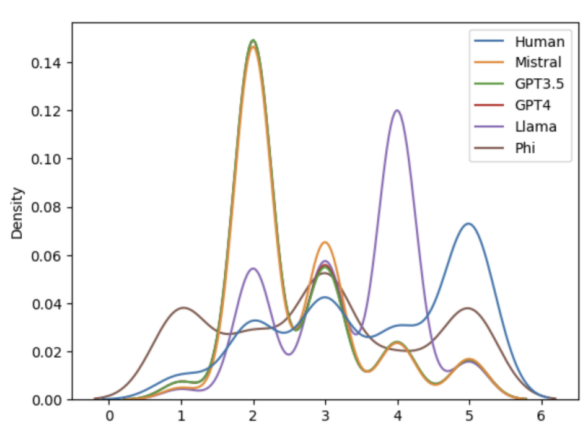
Efficient action representation and trajectory evaluation for imitation learning at UCLA Robot Intelligence Lab (Planning to submit at CoRL 2025) Stereo vision for the ARTEMIS humanoid robot For RoboCup 2024 Humanoids League (Secured first place) Agile autonomous quadrotor flight in cluttered environments For IROS 2022 Safe Robot Learning Competition RL for autonomous navigation in uncertain environments Implemented a DeepRL (A3C) pipeline A data-acquisition robot for acoustic sensing & localization Implemented as a Robot Audition project for DRDO, Govt. of India EKF and Optimization-based SLAM For IEEE RAS Winter School: SLAM in Deformable Environment DDP-based solver for various Optimal Control problems under contact sequence Course project for M270C: Optimal Control Persona Chatbots (with a focus on evaluation) Course Project for CS263A: Natural Language Processing CRAG Meta KDD Competition Course project for CS245: Big Data Analytics